
应用
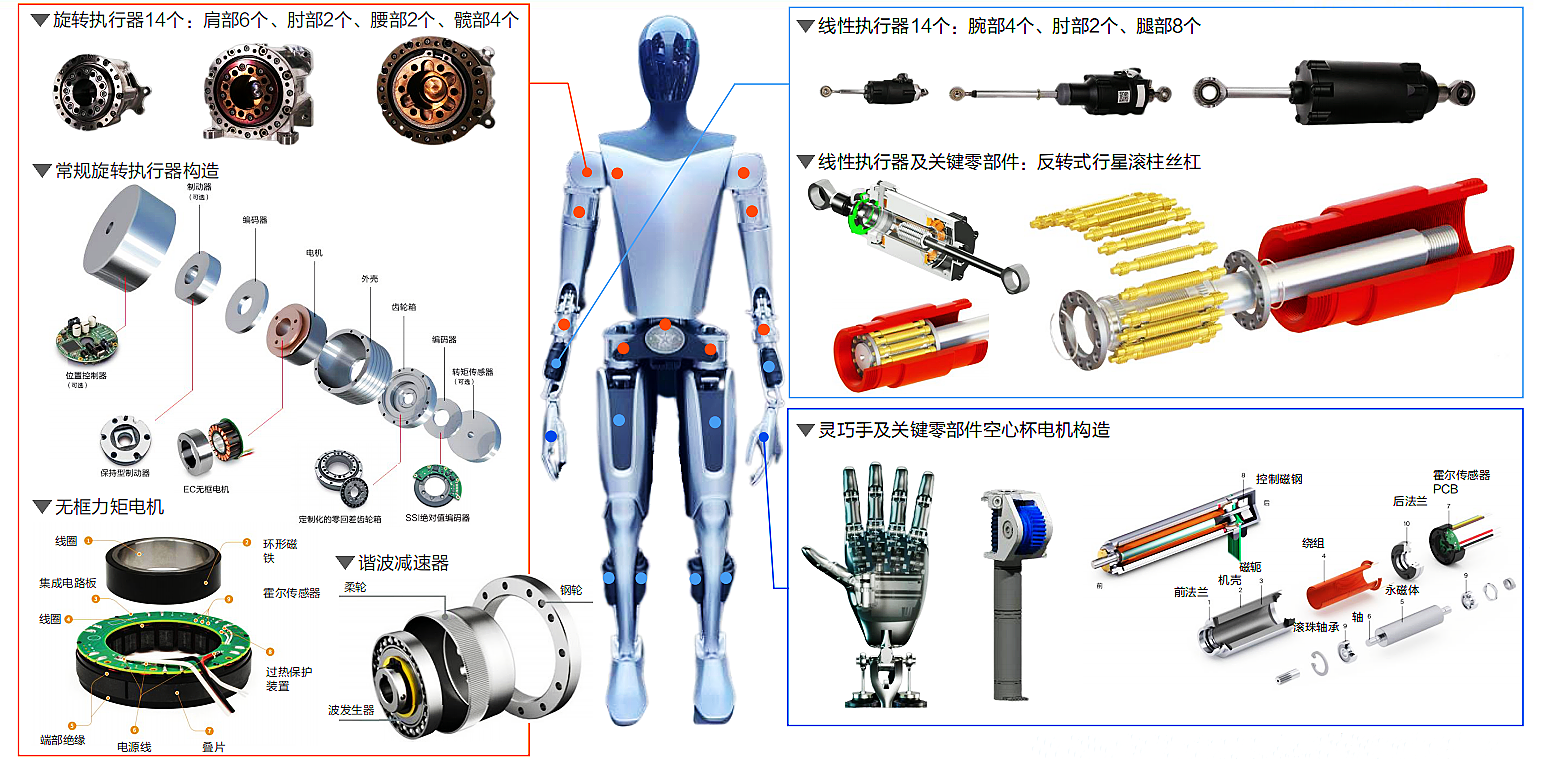
人形机器人
在人形机器人中,空心杯电机、无框力矩电机、行星齿轮减速器的应用至关重要,在不同的系统和功能模块中发挥着独特的作用,下面是它们的具体应用说明:
空心杯电机
无框力矩电机
行星齿轮减速机
空心杯电机因其效率高、响应快的特点,在人形机器人中得到广泛的应用,特别是在需要高精度、高速控制的场合。
关节驱动
传感器和执行器
灵活性和轻量化
空心杯电机常用于机器人的关节处,如手指、腕部、肘部等。这类电机具有低惯量、高转矩密度的特点,可以实现高速旋转和精准定位。
小型空心杯电机可以用于驱动微小传感器或执行器,提升机器人对外界环境的感知能力及精细动作的执行能力。
由于空心杯电机重量较轻且体积小,适合用于需要灵活运动和轻量化设计的人形机器人中。
无框力矩电机凭借其高扭矩和低速、大扭矩输出的优势,被广泛应用于机器人中需要强扭矩和稳定性的部位。
主要关节驱动
直接驱动系统
优化空间利用
腰部、肩部和髋部等关键关节通常采用无框力矩电机,以实现稳健的运动和承受较大的负载。
无框力矩电机多用于直接驱动系统,减少了中间传动机构,从而降低了机械损耗,提高了系统的可靠性和寿命。
无框设计使电机可直接集成到结构中,节省了大量空间,有助于实现紧凑设计。
行星齿轮减速器通过增加扭矩和减少转速,提升电机的输出性能,在机器人多个运动系统中都有应用。
转矩放大
精度控制
减速平稳性
在电机输出轴与机器人关节之间添加行星齿轮减速器,可以有效提高输出扭矩,使机器人能够执行更强劲的动作。
通过减速器可以实现更精细的速度和位置控制,适用于对运动精度要求高的部件,例如机器人手臂末端执行器。
行星齿轮减速器结构紧凑、运转平稳,适用于对振动和噪音敏感的应用场景,提升机器人整体运行的平稳性和舒适性。
应用
机械臂:
腕关节采用空心杯电机实现快速灵活的运动,肩部驱动采用无框力矩电机提供强大扭矩,行星齿轮减速器增加各关节总扭矩输出。
仿生腿:
髋关节、膝关节采用无框力矩电机实现高负载能力,行星齿轮减速器提供精确的减速和增加扭矩功能。
这些驱动技术协同工作,使得人形机器人能够实现复杂的动作、平滑的运动和高效的运行,推动人形机器人在工业自动化、服务机器人、医疗救援等各个领域的广泛应用。

在线留言
*我们尊重您的保密性并且所有信息都受到保护。